




教 育

-

《自然与设计》参考美国欧林工学院《Design Nature》课程,并根据科创班教学理念优化而来。课程为一年级新生提供一种“通过学习和模拟自然特征来体验设计过程”的教学环节。
-
主要通过工程项目的实现,运用基础理论课程和多门专业课程的知识完成项目设定的任务。课程内容主要涉及电路原理、模拟电路、数字电路、计算机原理、自动控制、嵌入式开发、电子产品设计与生产等相关内容。让学生学会如何将理论知识融入到项目实践中,又避免成为纯粹的实验课程。
-

课程结合主题鲜明的设计项目开展协同创新,通过“产学研创”一体化的实际项目锤炼学生设计能力、提升设计素养。强调学生学以致“用”,强调创新思维,将前序课程知识、专业技能转化为设计实践能力并使学生具备创新创业素质。
-

本课程主要训练应用数学概念于工程问题的关键手段,包含复变函数、积分变换和数理方程。复变函数提供了信号分析等问题的框架;积分变换在控制系统和电路分析中发挥着重要作用;数理方程是建模自然现象的数学工具,在结构分析、流体力学和热传导等问题中有广泛应用。
-
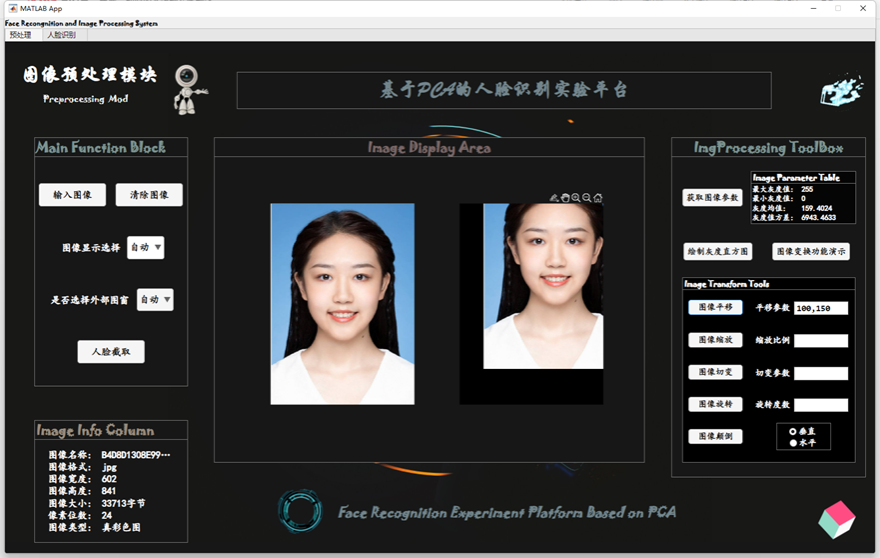
本课程项目部分要求基于线性代数理论知识和主成分(PCA)降维算法实现人脸识别。具体而言,班级全体学生提交自己的人脸图片组成人脸样本数据库,研究如何通过PCA等技术提取训练样本的特征,然后建立分类器对待测样本进行分类识别。每个章节内容对应着相应的人脸识别子问题,并按照子问题提出、相关理论介绍、子问题的Matlab求解过程以及相关理论的其他拓展来统筹讲解各章内容。
-

课程项目以小车自主穿越迷宫为目标,将完成该目标所需的主要工作分为4个任务,分别集中于:传感器数据处理、传感器联合标定、车辆控制、SLAM建图与导航。学生3人一组,分阶段完成所有任务,并最终需要在课程组统一搭建的迷宫中,实现小车自主穿越,并能克服地图动态变化和障碍物阻挡的干扰,顺利走出迷宫。同学们通过该项目的实施,能够掌握车载软件开发相关的一系列基础知识,并积累丰富的开发经验。
-

项目驱动:基于项目需求,培养学生运用数学、人工智能、控制论等科学知识的工程实践能力。 学科交叉:综合计算机视觉、机器人、控制科学、人工智能等多个学科的知识,提升学生的综合能力
-

项目基于松灵小车SCOUT MINI进行设计,组织学生了解小车搭载的激光雷达传感器、双目摄像头和IMU模块,并使用ROS订阅节点,收集点云图像数据。数据进行处理和标注,并加入深度学习模型进行训练。学生使用纸箱、标志牌等物品自行设计并搭建场景地图,利用自己收集并标注的数据训练模型,设计编写底盘控制逻辑,实现小车在场景地图中面对不同标志物与地形做出相应动作。
-

形成“1-2-3”三位一体式教学方式:课堂围绕1个主题知识点,融合教师问题式引导与学生提问解惑2种授课模式,形成课前素材信息导入、课堂师生互动研讨、课后巩固拓展实践3个环节,环环紧扣,夯实学生基础知识。 建设基于车联网感传算全流程联调的项目制实施方式:搭建集软件仿真、硬件在环、系统联调一体的项目平台,以项目为载体组织课程内容,增强学生实践能力。 落实高校与企业共同规划、共同建设、共同指导、共同评价:与中信科智联等车联网代表性企业深度合作,面向产业实际问题,引入企业车规级C-V2X通信模组等软硬件平台,邀请行业专家指导课程实施,实现全过程校企联合培养。
-
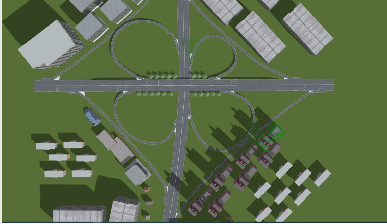
工业软件Prescan为仿真环境,设置两个循序渐进的项目 复杂路网建模仿真项目:使用仿真软件建立真实路网的模型,包括立交桥、停止线、斑马线、交通标志和红绿灯等道路元素 车辆驾驶仿真项目:构造交通场景,包含红绿灯切换、驾驶车辆跟车、行人和车辆闯红灯等情况,根据传感器数据,实现自动驾驶算法,并测试评估

 学院地址:重庆市渝北区两江大道9号
学院地址:重庆市渝北区两江大道9号
 邮政编码:401135
邮政编码:401135
 官方邮箱:eie@cqu.edu.cn
官方邮箱:eie@cqu.edu.cn
Copyright© 2022 All Rights Reserved. 重庆大学版权所有 渝ICP备15007027号-4

